
CHS: Small: Socially-Aware Navigation
Abstract: The promise of robots to serve in assistive capacities for care and cooperation is invaluable. Socially assistive robots have the potential to make a positive impact on people in need of physical therapy, children in need of educational intervention, children with developmental disorders, and patients post-stroke. However, socially inappropriate behavior can harm the long-term adoption of these assistive platforms. In particular, while typically understood only as getting from point A to point B, robot movement can constitute communication without any use of words, and even when not intended. This can have serious ramifications for the success of a social interaction between one or more people and a robot. A robot in a long-term interaction (say in a hospital, school, or home setting) may have dozens or even hundreds of navigation destinations every day; sometimes, the "optimal" navigation behavior may not match the socially appropriate course of action. Socially inappropriate navigation behavior has been attributed as a major impediment to the long-term adoption of assistive robots in hospital settings. To address that problem, this project will develop a socially-aware navigation planner for autonomous robots that mimics the social conventions of human-human interactions, and will thereby advance the applications of autonomous robot technology. Model-based navigation planning for social appropriateness will involve observing the activities and intentions of people in social proximity to a robot and/or other people, and then selecting robot trajectories that are both spatially and socially optimal. This work will then build upon that foundation by expanding the library of spatial communication that a robot can understand and communicate in an autonomous fashion. The research will incorporate high-level features, such as intent recognition, into the model development along with low-level features, such as interpersonal distance, to create models of complex behavior considering both the spatial scene and the inferred intention of the actors in that scene. The Pareto Concavity Elimination Transformation (PaCcET) multi-objective optimization framework will be utilized to develop socially appropriate navigation behavior policies. The developed planner will be validated on several types of robot platforms.
Details
- Organization: National Science Foundation
- Award #: IIS-1719027
- Amount: $500,000
- Date: Sept. 1, 2017 - May 31, 2022
- PI: Dr. David Feil-Seifer
- Co-PI:
Dr. Monica Nicolescu
Supported Publications
- Salek Shahrezaie, R., Anima, B., & Feil-Seifer, D. Birds of a Feather Flock Together: A study of status homophily in HRI. In International Conference on Social Robotics, page 281-291, Sep 2021. ( details ) ( .pdf )
- Banisetty, S., Rajamohan, V., Vega, F., & Feil-Seifer, D. A Deep Learning Approach To Multi-Context Socially-Aware Navigation. In International Conference on Robot and Human Interactive Communication (RO-MAN), page 23-30, Vancouver, BC, Canada, Aug 2021. ( details ) ( .pdf )
- Banisetty, S., Forer, S., Yliniemi, L., Nicolescu, M., & Feil-Seifer, D. Socially-Aware Navigation: A Non-linear Multi-Objective Optimization Approach. In ACM Transactions on Interactive Intelligent Systems, 11(15), Jul 2021. ( details ) ( .pdf )
- Salek Shahrezaie, R., Manalo, B. L., & Feil-Seifer, D. Knowledge-based Reasoning for Navigation in Public Spaces. RSS Workshop on Social Robot Navigation. Jul 2021. RSS Workshop on Social Robot Navigation. ( details ) ( .pdf )
- Salek Shahrezaie, R., Banisetty, S., Mohammadi, M., & Feil-Seifer, D. Towards Deep Reasoning on Social Rules for Socially Aware Navigation. Boulder, CO, USA, ACM Human-Robot Interaction Companion. Mar 2021. ACM Human-Robot Interaction Companion. ( details ) ( .pdf )
- Honour, A., Banisetty, S., & Feil-Seifer, D. Perceived Social Intelligence as Evaluation of Socially Navigation. Boulder, CO, USA., ACM Human-Robot Interaction Companion. Mar 2021. ACM Human-Robot Interaction Companion. ( details ) ( .pdf )
- Palmer, A., Peterson, C., Blankenburg, J., Nicolescu, M., & Feil-Seifer, D. Simple Camera-to-2D-LiDAR Calibration Method for General Use. In International Conference on Visual Computing (ISVC), Virtual, Oct 2020. ( details ) ( .pdf )
- Barchard, K., Lapping-Carr, L., Westfall, S., Fink-Armold, A., Banisetty, S., & Feil-Seifer, D. Measuring the Perceived Social Intelligence of Robots. In ACM Transactions on Human-Robot Interaction (THRI), 9(4):1-29, Sep 2020. ( details ) ( .pdf )
- Rajamohan, V., Factors Influencing The Human Preferred Interaction Distance. May 2020. ( details ) ( .pdf )
- Banisetty, S., Multi-Context Socially-Aware Navigation Using Non-Linear Optimization. University of Nevada Reno, May 2020. ( details ) ( .pdf )
- Palmer, A., Person Profiles and Sensor Calibration for Intent Recognition in Socially Aware Navigation. May 2020. ( details )
- Helm, M., Santos, C. J., Denecker, L., Huang, Y., Barchard, K., Lapping-Carr, L., Westfall, S., & Feil-Seifer, D. What the factors(s)!?: Perceptions of social intelligence in robots. Poster Paper in Western Psychological Association Convention, San Francisco, CA, Apr 2020. ( details )
- Robinson, B., Bjelica, F., Barchard, K., Lapping-Carr, L., Westfall, S., & Feil-Seifer, D. Differences in Male and Female Perceptions of Robot Social Intelligence. In Rocky Mountain Psychological Association Annual Convention, Denver, CO, Apr 2020. ( details )
- Blankenburg, J., Kelley, R., Feil-Seifer, D., Wu, R., Barford, L., & Harris, C. F. Towards GPU-Accelerated PRM for Autonomous Navigation. In International Conference on Information Technology : New Generations (ITNG), Las Vegas, NV, Apr 2020. ( details ) ( .pdf )
- Carlson, Z., Lemmon, L., Higgins, M., Frank, D., Salek Shahrezaie, R., & Feil-Seifer, D. Perceived mistreatment and emotional capability following aggressive treatment of robots and computers. In International Journal of Social Robotics (IJSR), 11(5):727-739, Oct 2019. ( details ) ( .pdf )
- Sturgeon, S., Palmer, A., Blankenburg, J., & Feil-Seifer, D. Perception of Social Intelligence in Robots Performing False-Belief Tasks. In International Symposium on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, IEEE. Oct 2019. IEEE. ( details ) ( .pdf )
- Rajamohan, V., Scully-Allison, C., Dascalu, S., & Feil-Seifer, D. Factors Influencing The Human Preferred Interaction Distance. In IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, Oct 2019. ( details ) ( .pdf )
- Barchard, K., Lapping-Carr, L., Westfall, S., & Feil-Seifer, D. Perceived social intelligence of robots.. To Appear in Society for Personality and Social Psychology, Portland, Oregon, Feb 2019. ( details )
- Banisetty, S. & Feil-Seifer, D. Towards a Unified Planner For Socially-Aware Navigation. In AAAI Fall Symposium Series: AI-HRI Artificial Intelligence for Human-Robot Interaction, Nov 2018. ( details ) ( .pdf )
- Forer, S., Banisetty, S., Yliniemi, L., Nicolescu, M., & Feil-Seifer, D. Socially-Aware Navigation Using Non-Linear Multi-Objective Optimization. In IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, Oct 2018. ( details ) ( .pdf )
- Barchard, K., Lapping-Carr, L., Westfall, S., Banisetty, S., & Feil-Seifer, D. Measuring 20 aspects of the perceived social intelligence of robots. Poster Paper in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, Oct 2018. ( details )
- Barchard, K., Lapping-Carr, L., Westfall, S., Banisetty, S., & Feil-Seifer, D. Perceived Social Intelligence (PSI) Scales test manual. Unpublished psychological test and test manual. Observer report of 20 aspects of social intelligence of robots, with four items per scale. Technical Report, Aug 2018. ( details ) ( .pdf )
Supported Projects
Improving People Detecting Infrastructures for the Purpose of Modeling Human Behavior June 3, 2019 - Present
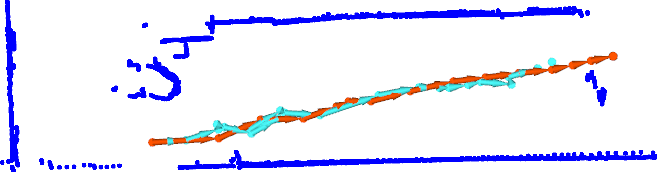 We need to model human behavior for a better understanding of how robots can behave in crowds. To do that, we can to use lasers to track people’s movements during different social interactions. We have developed a system to enable multiple 2-dimensional, stationary lasers to capture movements of people within a large room during social events. With calibrated lasers, we tracked a moving person’s ankles and predicted his/her path using linear regression. We were also able to overlap all laser fields and convert them into a single point cloud. After comparing the point cloud over five time frames, we correctly detected movement and found ankles in the point cloud with our circle detection algorithm. Using the locations of the tracked ankles, we used linear regression to accurately predict the path of the person. Although the positioning is not perfect, the overall shape of the predicted path resembles the actual path taken by the person. We hope that others will use this system to better understand and model human behavior.
We need to model human behavior for a better understanding of how robots can behave in crowds. To do that, we can to use lasers to track people’s movements during different social interactions. We have developed a system to enable multiple 2-dimensional, stationary lasers to capture movements of people within a large room during social events. With calibrated lasers, we tracked a moving person’s ankles and predicted his/her path using linear regression. We were also able to overlap all laser fields and convert them into a single point cloud. After comparing the point cloud over five time frames, we correctly detected movement and found ankles in the point cloud with our circle detection algorithm. Using the locations of the tracked ankles, we used linear regression to accurately predict the path of the person. Although the positioning is not perfect, the overall shape of the predicted path resembles the actual path taken by the person. We hope that others will use this system to better understand and model human behavior.
Socially-Aware Navigation Sept. 1, 2017 - Present
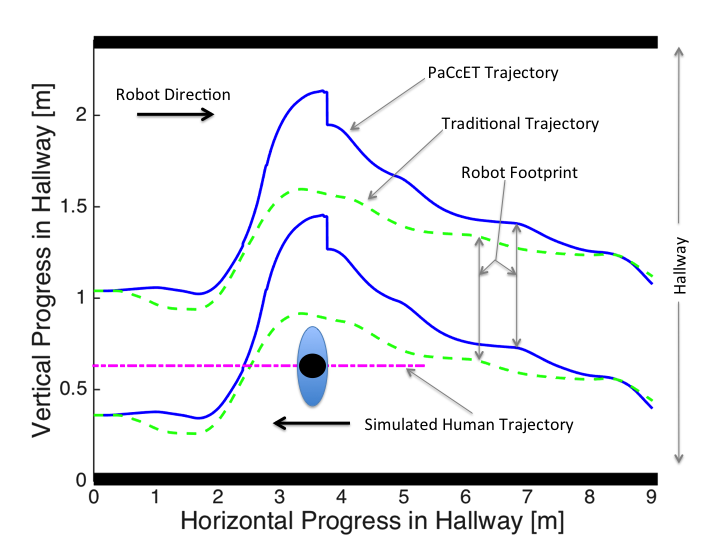 As robots become more integrated into people's daily lives, interpersonal navigation becomes a larger concern. In the near future, Socially Assistive Robots (SAR) will be working closely with people in public environments. To support this, making a robot safely navigate in the real-world environment has become for active study. However, for robots to effectively interact with people, they will need to exhibit socially-appropriate behavior as well. The real-world environment is full of unpredictable events; the potential social cost of a robot not following social norms becomes high. Robots that violate these norms risk being isolated and falling out of use, or even being mistreated by their human interaction partners.
The focus of this work is to develop a people-aware navigation planner to handle a larger range of person-oriented navigation behaviors utilizing a multi-modal distribution model of human-human interaction. Interpersonal distance models based on features which could be detected real-time using on-board robot sensors can be used to discriminate between a set of human actions and provide a social appropriateness score for a potential navigation trajectory. These models are used to weigh the trajectories and select the most appropriate action for the given situation. This robot navigation mimics the adherence to social norms while simultaneously adhering to a stated navigation goal as well. The goal of this system is to sense interpersonal distance and choose a trajectory that jointly optimizes for both social-appropriateness and goal-orientedness.
As robots become more integrated into people's daily lives, interpersonal navigation becomes a larger concern. In the near future, Socially Assistive Robots (SAR) will be working closely with people in public environments. To support this, making a robot safely navigate in the real-world environment has become for active study. However, for robots to effectively interact with people, they will need to exhibit socially-appropriate behavior as well. The real-world environment is full of unpredictable events; the potential social cost of a robot not following social norms becomes high. Robots that violate these norms risk being isolated and falling out of use, or even being mistreated by their human interaction partners.
The focus of this work is to develop a people-aware navigation planner to handle a larger range of person-oriented navigation behaviors utilizing a multi-modal distribution model of human-human interaction. Interpersonal distance models based on features which could be detected real-time using on-board robot sensors can be used to discriminate between a set of human actions and provide a social appropriateness score for a potential navigation trajectory. These models are used to weigh the trajectories and select the most appropriate action for the given situation. This robot navigation mimics the adherence to social norms while simultaneously adhering to a stated navigation goal as well. The goal of this system is to sense interpersonal distance and choose a trajectory that jointly optimizes for both social-appropriateness and goal-orientedness.
Perceptions of Social Intelligence Scale Sept. 1, 2017 - Present
Social intelligence is the ability to interact effectively with others in order to accomplish your goals (Ford & Tisak, 1983). Social intelligence is critically important for social robots, which are designed to interact and communicate with humans (Dautenhahn, 2007). Social robots might have goals such as building relationships with people, teaching people, learning something from people, helping people accomplish tasks, and completing tasks that directly involve people’s bodies (e.g., lifting people, washing people) or minds (e.g., retrieving phone numbers for people, scheduling appointments for people). In addition, social robots may try to avoid interfering with tasks that are being done by people. For example, they may try to be unobtrusive and not interrupt. Social intelligence is also important for robots engaged in non-social tasks if they will be around people when they are doing their work. Like social robots, such task-focused robots may be designed to avoid interfering with the work of people around them. This is important not just for the people the robots work with, but also for the robots themselves. For example, if a robotic vacuum bumps into people or scares household pets, the owners may turn it off. In addition, task-focused robots will be better able to accomplish their goals if they can inspire people to assist them when needed. For example, if a delivery robot is trying to take a meal to a certain room in a hospital and its path is blocked by a cart, it may be beneficial if it can inspire nearby humans to move the cart. While previous research on human-robot interaction (HRI) has referenced and contained aspects of the social intelligence of robots (Bartneck, Kulic, Croft, & Zoghbi, 2009; Ho, MacDorman, 2010; Ho, MacDorman, 2017; Moshkina, 2012; Nomura, Suzuki, Kanda, & Kato, 2006), the concept of robotic social intelligence has not been clearly defined. Measures of similar concepts are brief and incomplete, and often include extraneous variables. Moreover, measures of human social intelligence (e.g., Baron-Cohen, S. Wheelwright ,& Hill, 2001; Silvera, Martinussen, & Dahl, 2001) cannot be adapted for robots, because they assess skills that current and near-future robots do not have and because they omit basic skills that are essential for smooth social interactions. Therefore, we designed a set of 20 scales to measure the perceived social intelligence of robots.
Empirical Study of Socially-Appropriate Interaction July 1, 2013 - Present
 The goal of this project is to investigate how human-robot interaction is best structured for everyday interaction. Possible scenarios include work, home, and other care settings where socially assistive robotics may be used as educational aids, provide aid for persons with disabilities, and act as therapeutic aids for children with developmental disorders. In order for robots to be integrated smoothly into our daily lives, a much clearer understanding of fundamental human-robot interaction principles is required. Human-human interaction demonstrates how collaboration between humans and robots may occur. This project will study how socially appropriate interaction and, importantly socially-inappropriate interaction can affect human-robot collaboration.
In order to explore the nature of collaborative HRI for long-term interaction, REU participants will work with project personnel to develop controlled experiments which isolate individual aspects of collaborative HRI such as conformity, honesty, mistreatment, and deference. Students will examine these factors in a single-session experiment that they design. The results from these experiments will be used to focus multi-session follow-up studies that will be conducted in-between summers. The results of this research project will be a compendium of data demonstrating how humans and robots interact in situations of daily life, such as manufacturing, education, and daily living.
The goal of this project is to investigate how human-robot interaction is best structured for everyday interaction. Possible scenarios include work, home, and other care settings where socially assistive robotics may be used as educational aids, provide aid for persons with disabilities, and act as therapeutic aids for children with developmental disorders. In order for robots to be integrated smoothly into our daily lives, a much clearer understanding of fundamental human-robot interaction principles is required. Human-human interaction demonstrates how collaboration between humans and robots may occur. This project will study how socially appropriate interaction and, importantly socially-inappropriate interaction can affect human-robot collaboration.
In order to explore the nature of collaborative HRI for long-term interaction, REU participants will work with project personnel to develop controlled experiments which isolate individual aspects of collaborative HRI such as conformity, honesty, mistreatment, and deference. Students will examine these factors in a single-session experiment that they design. The results from these experiments will be used to focus multi-session follow-up studies that will be conducted in-between summers. The results of this research project will be a compendium of data demonstrating how humans and robots interact in situations of daily life, such as manufacturing, education, and daily living.