
Socially-Aware Navigation
 As robots become more integrated into people's daily lives, interpersonal navigation becomes a larger concern. In the near future, Socially Assistive Robots (SAR) will be working closely with people in public environments. To support this, making a robot safely navigate in the real-world environment has become for active study. However, for robots to effectively interact with people, they will need to exhibit socially-appropriate behavior as well. The real-world environment is full of unpredictable events; the potential social cost of a robot not following social norms becomes high. Robots that violate these norms risk being isolated and falling out of use, or even being mistreated by their human interaction partners.
As robots become more integrated into people's daily lives, interpersonal navigation becomes a larger concern. In the near future, Socially Assistive Robots (SAR) will be working closely with people in public environments. To support this, making a robot safely navigate in the real-world environment has become for active study. However, for robots to effectively interact with people, they will need to exhibit socially-appropriate behavior as well. The real-world environment is full of unpredictable events; the potential social cost of a robot not following social norms becomes high. Robots that violate these norms risk being isolated and falling out of use, or even being mistreated by their human interaction partners.
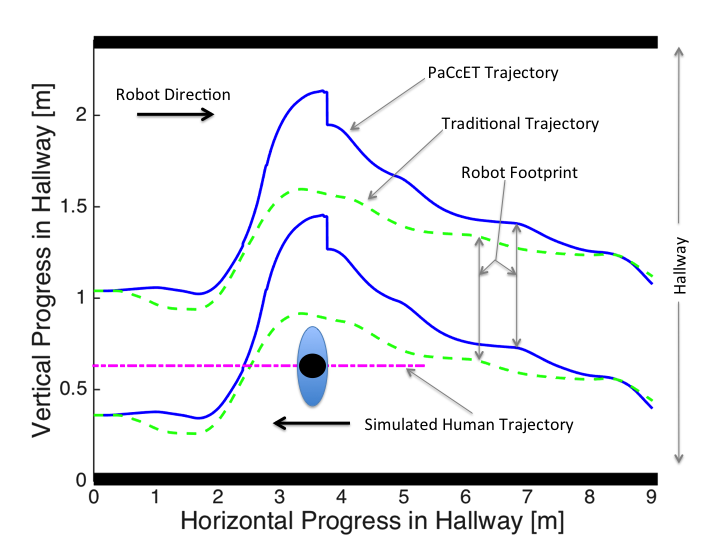
The focus of this work is to develop a people-aware navigation planner to handle a larger range of person-oriented navigation behaviors utilizing a multi-modal distribution model of human-human interaction. Interpersonal distance models based on features which could be detected real-time using on-board robot sensors can be used to discriminate between a set of human actions and provide a social appropriateness score for a potential navigation trajectory. These models are used to weigh the trajectories and select the most appropriate action for the given situation. This robot navigation mimics the adherence to social norms while simultaneously adhering to a stated navigation goal as well. The goal of this system is to sense interpersonal distance and choose a trajectory that jointly optimizes for both social-appropriateness and goal-orientedness.
People
- Director: Dr. David Feil-Seifer
- Dr. Santosh Balajee Banisetty
- Scott Forer
- Dr. Monica Nicolescu
- Roya Salek Shahrezaie
- Logan Yliniemi
Publications
- Forer, S., Banisetty, S., Yliniemi, L., Nicolescu, M., & Feil-Seifer, D. Socially-Aware Navigation Using Non-Linear Multi-Objective Optimization. In IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, Oct 2018. ( details ) ( .pdf )
- Sebastian, M., Banisetty, S., & Feil-Seifer, D. Socially-Aware Navigation Planner Using Models of Human-Human Interaction. In International Symposium on Robot and Human Interactive Communication (RO-MAN), page 405-410, Lisbon, Portugal, Aug 2017. ( details ) ( .pdf )
- Banisetty, S., Sebastian, M., & Feil-Seifer, D. Socially-Aware Navigation: Action Discrimination To Select Appropriate Behavior. Poster Paper in Annual Graduate Poster Symposium (GSA), Nov 2016. ( details ) ( .pdf )
Support
- CHS: Small: Socially-Aware Navigation, National Science Foundation PI: David Feil-Seifer, Co-PI: Monica Nicolescu, Amount: $500,000, Sept. 1, 2017 - May 31, 2022
- Infrastructure For Socially-Aware Navigation For Long-Term Human-Robot Interaction, NASA EPSCoR PI: David Feil-Seifer, Co-PI: Kimberly Barchard, Amount: $30,416, July 1, 2017 - April 9, 2018
- REU Site: Collaborative Human-Robot Interaction, National Science Foundation PI: David Feil-Seifer, Co-PI: Shamik Sengupta, Amount: $360,000, Feb. 1, 2018 - Jan. 31, 2022