
Infrastructure For Socially-Aware Navigation For Long-Term Human-Robot Interaction
Abstract: Robot navigation behavior has serious ramifications for the success of a long-term social interaction between a person and a robot. Movement can convey social information without any use of words or gesture. Prior long-term deployments of robots in high-stress environments working alongside people have revealed that improper navigation actions can cause people to be less compliant with a robot, even to the point where human co-workers have verbally abused the robot, ceased to work alongside the robot, and even locked the robot in a closet! This project aims to create the infrastructure at both UNR and UNLV for developing a socially-aware navigation (SAN) planner for long-term human-robot collaboration use and to develop the evaluation infrastructure for examining the social appropriateness of robot movements/actions.
Details
- Organization: NASA EPSCoR
- Award #: NNX15AK48A
- Amount: $30,416
- Date: July 1, 2017 - April 9, 2018
- PI: Dr. David Feil-Seifer
- Co-PI:
Prof. Kimberly Barchard
Supported Publications
- Banisetty, S., Forer, S., Yliniemi, L., Nicolescu, M., & Feil-Seifer, D. Socially-Aware Navigation: A Non-linear Multi-Objective Optimization Approach. In ACM Transactions on Interactive Intelligent Systems, 11(15), Jul 2021. ( details ) ( .pdf )
- Barchard, K., Lapping-Carr, L., Westfall, S., Fink-Armold, A., Banisetty, S., & Feil-Seifer, D. Measuring the Perceived Social Intelligence of Robots. In ACM Transactions on Human-Robot Interaction (THRI), 9(4):1-29, Sep 2020. ( details ) ( .pdf )
- Banisetty, S., Multi-Context Socially-Aware Navigation Using Non-Linear Optimization. University of Nevada Reno, May 2020. ( details ) ( .pdf )
- Barchard, K., Lapping-Carr, L., Westfall, S., & Feil-Seifer, D. Perceived social intelligence of robots.. To Appear in Society for Personality and Social Psychology, Portland, Oregon, Feb 2019. ( details )
- Banisetty, S. & Feil-Seifer, D. Towards a Unified Planner For Socially-Aware Navigation. In AAAI Fall Symposium Series: AI-HRI Artificial Intelligence for Human-Robot Interaction, Nov 2018. ( details ) ( .pdf )
- Forer, S., Banisetty, S., Yliniemi, L., Nicolescu, M., & Feil-Seifer, D. Socially-Aware Navigation Using Non-Linear Multi-Objective Optimization. In IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, Oct 2018. ( details ) ( .pdf )
- Barchard, K., Lapping-Carr, L., Westfall, S., Banisetty, S., & Feil-Seifer, D. Measuring 20 aspects of the perceived social intelligence of robots. Poster Paper in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, Oct 2018. ( details )
- Barchard, K., Lapping-Carr, L., Westfall, S., Banisetty, S., & Feil-Seifer, D. Perceived Social Intelligence (PSI) Scales test manual. Unpublished psychological test and test manual. Observer report of 20 aspects of social intelligence of robots, with four items per scale. Technical Report, Aug 2018. ( details ) ( .pdf )
Supported Projects
Socially-Aware Navigation Sept. 1, 2017 - Present
 As robots become more integrated into people's daily lives, interpersonal navigation becomes a larger concern. In the near future, Socially Assistive Robots (SAR) will be working closely with people in public environments. To support this, making a robot safely navigate in the real-world environment has become for active study. However, for robots to effectively interact with people, they will need to exhibit socially-appropriate behavior as well. The real-world environment is full of unpredictable events; the potential social cost of a robot not following social norms becomes high. Robots that violate these norms risk being isolated and falling out of use, or even being mistreated by their human interaction partners.
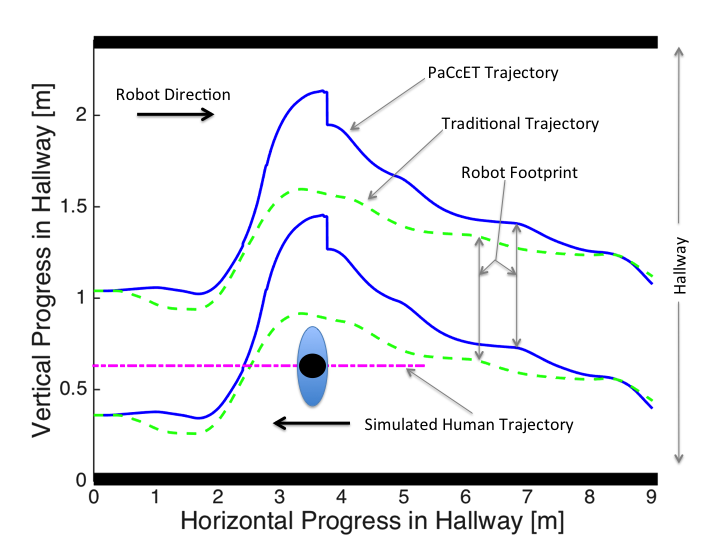
The focus of this work is to develop a people-aware navigation planner to handle a larger range of person-oriented navigation behaviors utilizing a multi-modal distribution model of human-human interaction. Interpersonal distance models based on features which could be detected real-time using on-board robot sensors can be used to discriminate between a set of human actions and provide a social appropriateness score for a potential navigation trajectory. These models are used to weigh the trajectories and select the most appropriate action for the given situation. This robot navigation mimics the adherence to social norms while simultaneously adhering to a stated navigation goal as well. The goal of this system is to sense interpersonal distance and choose a trajectory that jointly optimizes for both social-appropriateness and goal-orientedness.
As robots become more integrated into people's daily lives, interpersonal navigation becomes a larger concern. In the near future, Socially Assistive Robots (SAR) will be working closely with people in public environments. To support this, making a robot safely navigate in the real-world environment has become for active study. However, for robots to effectively interact with people, they will need to exhibit socially-appropriate behavior as well. The real-world environment is full of unpredictable events; the potential social cost of a robot not following social norms becomes high. Robots that violate these norms risk being isolated and falling out of use, or even being mistreated by their human interaction partners.
The focus of this work is to develop a people-aware navigation planner to handle a larger range of person-oriented navigation behaviors utilizing a multi-modal distribution model of human-human interaction. Interpersonal distance models based on features which could be detected real-time using on-board robot sensors can be used to discriminate between a set of human actions and provide a social appropriateness score for a potential navigation trajectory. These models are used to weigh the trajectories and select the most appropriate action for the given situation. This robot navigation mimics the adherence to social norms while simultaneously adhering to a stated navigation goal as well. The goal of this system is to sense interpersonal distance and choose a trajectory that jointly optimizes for both social-appropriateness and goal-orientedness.
Perceptions of Social Intelligence Scale Sept. 1, 2017 - Present
Social intelligence is the ability to interact effectively with others in order to accomplish your goals (Ford & Tisak, 1983). Social intelligence is critically important for social robots, which are designed to interact and communicate with humans (Dautenhahn, 2007). Social robots might have goals such as building relationships with people, teaching people, learning something from people, helping people accomplish tasks, and completing tasks that directly involve people’s bodies (e.g., lifting people, washing people) or minds (e.g., retrieving phone numbers for people, scheduling appointments for people). In addition, social robots may try to avoid interfering with tasks that are being done by people. For example, they may try to be unobtrusive and not interrupt. Social intelligence is also important for robots engaged in non-social tasks if they will be around people when they are doing their work. Like social robots, such task-focused robots may be designed to avoid interfering with the work of people around them. This is important not just for the people the robots work with, but also for the robots themselves. For example, if a robotic vacuum bumps into people or scares household pets, the owners may turn it off. In addition, task-focused robots will be better able to accomplish their goals if they can inspire people to assist them when needed. For example, if a delivery robot is trying to take a meal to a certain room in a hospital and its path is blocked by a cart, it may be beneficial if it can inspire nearby humans to move the cart. While previous research on human-robot interaction (HRI) has referenced and contained aspects of the social intelligence of robots (Bartneck, Kulic, Croft, & Zoghbi, 2009; Ho, MacDorman, 2010; Ho, MacDorman, 2017; Moshkina, 2012; Nomura, Suzuki, Kanda, & Kato, 2006), the concept of robotic social intelligence has not been clearly defined. Measures of similar concepts are brief and incomplete, and often include extraneous variables. Moreover, measures of human social intelligence (e.g., Baron-Cohen, S. Wheelwright ,& Hill, 2001; Silvera, Martinussen, & Dahl, 2001) cannot be adapted for robots, because they assess skills that current and near-future robots do not have and because they omit basic skills that are essential for smooth social interactions. Therefore, we designed a set of 20 scales to measure the perceived social intelligence of robots.
Methods For Facilitating Long-Term Acceptance of a Robot July 1, 2013 - Present
Scenarios that call for lt-HRI, such as home health care and cooperative work environments, have interesting social dynamics, even before robots are introduced. The success of human-only teams can be limited by the trust and willingness to collaborate within the team, consideration is worthy of factors that may affect adoption of robots in long-term settings. A coworker who is unwilling to collaborate and trust the abilities of their fellow teammate may refuse to include that teammate in many job related tasks due to territorial behaviors. Exclusion of a robotic team member might eventually lead to a lack of productivity in lt-HRI. Behavior toward a robot companion may be governed, in part, by pre-conceived notions about robots. However, prior work has shown that simple team-building exercises can positively affect attitudes toward a robot, even if the robot under-performs at a task. This objective will address these issues by adapting and evaluating facilitation strategies that have been successful in encouraging the adoption of new technology or improving team cohesion. We will study how these facilitation techniques can bolster human-robot cooperation.