
UGV-UAV Hybrid System for Unstructured Environment Exploration
Abstract:
Details
- Organization: NASA
- Award #: Seed RID Grant
- Amount: 83,523
- Date: Sept. 1, 2016 - Aug. 31, 2017
- PI: Dr. Hung La
- Co-PI:
Dr. David Feil-Seifer
Paul Oh
Supported Publications
- Singandhupe, A., La, H., & Feil-Seifer, D. Reliable Security Algorithm for Drones Using Individual Characteristics From an EEG Signal. In IEEE Access, 6(1):22976-22986, Apr 2018. ( details ) ( .pdf )
- Pham, X. H., La, H., Feil-Seifer, D., & Deans, M. A Distributed Control Framework of Multiple Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. In IEEE Transactions on Systems, Man and Cybernetics: Systems, Apr 2018. ( details )
- Ahmed Siddiqui, K., Feil-Seifer, D., Yang, T., Jose, S., Liu, S., & Louis, S. Development of a Swarm UAV Simulator Integrating Realistic Motion Control Models For Disaster Operations. In Proceedings of the ASME Dynamic Systems and Controls Conference (DSCC), page V003T39A003, Tysons Corner, Virginia, Oct 2017. ( details ) ( .pdf )
- Singandhupe, A., La, H., Feil-Seifer, D., Huang, P., Guo, L., & Li, M. Securing a UAV Using Individual Characteristics From an EEG Signal. In Proceedings of the IEEE Systems, Man, and Cybernetics Conference, page 2748-2753, Banff, Alberta, preprint, \url{https://arxiv.org/abs/1704.04574}. Oct 2017. preprint, \url{https://arxiv.org/abs/1704.04574}. ( details ) ( .pdf )
- Pham, X. H., La, H., Feil-Seifer, D., & Deans, M. A Distributed Control Framework for a Team of Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), page 6648-6653, Vancouver, BC, Canada, Sep 2017. ( details ) ( .pdf )
Supported Projects
Disaster Management Simulator Jan. 1, 2016 - Jan. 1, 2018
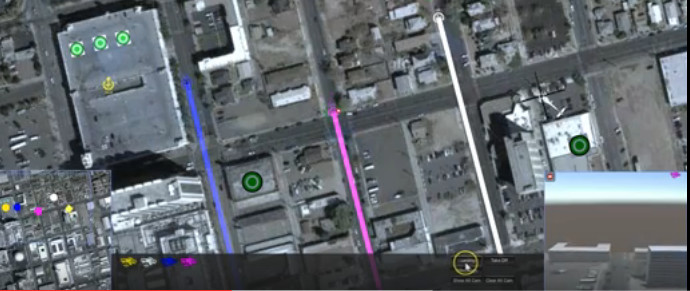 We are developing a disaster mitigation training simulator for emergency management personnel to develop skills tasking multi-UAV swarms for overwatch or delivery tasks. This simulator shows the City of Reno after a simulated earthquake and allows an operator to fly a simulated UAV swarm through this disaster zone to accomplish tasks to help mitigate the effects of the scenario. We are using this simulator to evaluate user interface design and to help train emergency management personnel in effective UAV operation.
We are developing a disaster mitigation training simulator for emergency management personnel to develop skills tasking multi-UAV swarms for overwatch or delivery tasks. This simulator shows the City of Reno after a simulated earthquake and allows an operator to fly a simulated UAV swarm through this disaster zone to accomplish tasks to help mitigate the effects of the scenario. We are using this simulator to evaluate user interface design and to help train emergency management personnel in effective UAV operation.