
Improving People Detecting Infrastructures for the Purpose of Modeling Human Behavior
 We need to model human behavior for a better understanding of how robots can behave in crowds. To do that, we can to use lasers to track people’s movements during different social interactions. We have developed a system to enable multiple 2-dimensional, stationary lasers to capture movements of people within a large room during social events. With calibrated lasers, we tracked a moving person’s ankles and predicted his/her path using linear regression. We were also able to overlap all laser fields and convert them into a single point cloud. After comparing the point cloud over five time frames, we correctly detected movement and found ankles in the point cloud with our circle detection algorithm. Using the locations of the tracked ankles, we used linear regression to accurately predict the path of the person. Although the positioning is not perfect, the overall shape of the predicted path resembles the actual path taken by the person. We hope that others will use this system to better understand and model human behavior.
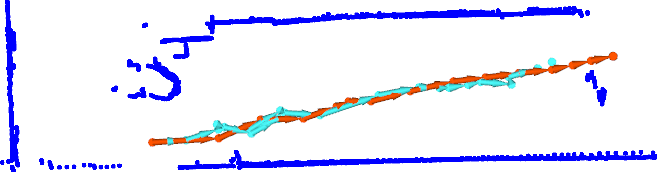
We need to model human behavior for a better understanding of how robots can behave in crowds. To do that, we can to use lasers to track people’s movements during different social interactions. We have developed a system to enable multiple 2-dimensional, stationary lasers to capture movements of people within a large room during social events. With calibrated lasers, we tracked a moving person’s ankles and predicted his/her path using linear regression. We were also able to overlap all laser fields and convert them into a single point cloud. After comparing the point cloud over five time frames, we correctly detected movement and found ankles in the point cloud with our circle detection algorithm. Using the locations of the tracked ankles, we used linear regression to accurately predict the path of the person. Although the positioning is not perfect, the overall shape of the predicted path resembles the actual path taken by the person. We hope that others will use this system to better understand and model human behavior.
People
- Director: Dr. David Feil-Seifer
- Tomohide Bessho
- Andrew Palmer
Support
- CHS: Small: Socially-Aware Navigation, National Science Foundation PI: David Feil-Seifer, Co-PI: Monica Nicolescu, Amount: $500,000, Sept. 1, 2017 - May 31, 2022
- REU Site: Collaborative Human-Robot Interaction, National Science Foundation PI: David Feil-Seifer, Co-PI: Shamik Sengupta, Amount: $360,000, Feb. 1, 2018 - Jan. 31, 2022