
CHS: Small: Collaborative Research: Spatio-Temporal Situational Awareness in Large-Scale Disasters Using Low-Cost Unmanned Aerial Vehicles
Abstract: Providing real-time situational awareness is a critical but immensely challenging component in the management of large-scale disasters such as wildfires, where incident managers need to make timely decisions and allocate resources. Yet gathering accurate real-time information is difficult due to the multi-scale spatio-temporal nature of the event, the overwhelming amount of data that has to be processed in near real-time, the heterogeneous nature of the technological resources involved, and the complex interdependencies and interactions between human and technological entities. Recent advances in various areas of cyber-physical and information systems, including sensing, mapping, communication, computing technologies, and unmanned systems, have provided an unprecedented opportunity to revolutionize the acquisition of situational awareness in a large-scale disaster. The objective of this multi-institutional project is to conduct fundamental research aimed at creating user-centered control and algorithmic tools that integrate real-time sensory data from multi-rotor unmanned aerial vehicles (UAVs) into effective fire-predictor software, which will allow a team of UAVs equipped with electro-optical sensors to generate situational awareness in a large-scale wildfire. The PIs will develop a reliable and affordable UAV system that is portable, safe, and easy to operate by first responders (especially firefighters and forestry officials), and which will enable them to make informed decisions which can optimize resource allocation and thereby save both property and lives. With the imminent inclusion of UAVs in the national airspace, the technologies developed in this research will have potential broad applicability to a number of other civilian applications such as law enforcement and border patrol. Project objectives will be met by pursuing specific aims including the design of user-centered analytical and algorithmic tools for robust and safe motion control of UAVs for gathering information, the development of spatio-temporal situational awareness using real-time data and a fire propagation model, and the development of a command, control and communication (C3) framework for emergency management personnel integration. The PIs will create new algorithms for UAV trajectory generation that resourcefully carry out monitoring in a dynamic environment, along with new cooperative control algorithms for a team of UAVs tasked with dynamic perimeter tracking that are robust to addition and/or deletion of UAVs. They will devise distributed filtering methods coupled with reduced order modeling techniques based on real-time spatio-temporal decomposition, to seamlessly generate situational awareness in a computationally efficient manner. Finally, the PIs will develop simulation and field capacity, while studying human-robot interaction issues pertaining to the wildfire application. The PIs' user-centered design approach is novel, in that it will address not only usability issues related to the developed system, but also issues such as deployment, training, and changes in operational paradigms. To ensure project outcomes meet the needs of the target user community, the PI team will be working in collaboration with the City of Cincinnati's Fire Department and the State of West Virginia's Division of Forestry.
Details
- Organization: National Science Foundation
- Award #: IIS-1528137
- Amount: $166,666
- Date: Jan. 1, 2016 - Dec. 31, 2017
- PI: Dr. David Feil-Seifer
Supported Publications
- Pham, X. H., La, H., Feil-Seifer, D., & Nguyen, L. Reinforcement Learning for Autonomous UAV Navigation Using Function Approximation. In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, Aug 2018. ( details )
- Pham, X. H., La, H., Feil-Seifer, D., & Nguyen, L. Performance Comparison of Function Approximation-Based Q Learning Algorithms for Autonomous UAV Navigation. In Proceedings of the International Conference on Ubiquitous Robots (UR), Hawaii, US, Jun 2018. ( details )
- Singandhupe, A., La, H., & Feil-Seifer, D. Reliable Security Algorithm for Drones Using Individual Characteristics From an EEG Signal. In IEEE Access, 6(1):22976-22986, Apr 2018. ( details ) ( .pdf )
- Pham, X. H., La, H., Feil-Seifer, D., & Deans, M. A Distributed Control Framework of Multiple Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. In IEEE Transactions on Systems, Man and Cybernetics: Systems, Apr 2018. ( details )
- Ahmed Siddiqui, K., Feil-Seifer, D., Yang, T., Jose, S., Liu, S., & Louis, S. Development of a Swarm UAV Simulator Integrating Realistic Motion Control Models For Disaster Operations. In Proceedings of the ASME Dynamic Systems and Controls Conference (DSCC), page V003T39A003, Tysons Corner, Virginia, Oct 2017. ( details ) ( .pdf )
- Singandhupe, A., La, H., Feil-Seifer, D., Huang, P., Guo, L., & Li, M. Securing a UAV Using Individual Characteristics From an EEG Signal. In Proceedings of the IEEE Systems, Man, and Cybernetics Conference, page 2748-2753, Banff, Alberta, preprint, \url{https://arxiv.org/abs/1704.04574}. Oct 2017. preprint, \url{https://arxiv.org/abs/1704.04574}. ( details ) ( .pdf )
- Pham, X. H., La, H., Feil-Seifer, D., & Deans, M. A Distributed Control Framework for a Team of Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), page 6648-6653, Vancouver, BC, Canada, Sep 2017. ( details ) ( .pdf )
- Sebastian, M., Banisetty, S., & Feil-Seifer, D. Socially-Aware Navigation Planner Using Models of Human-Human Interaction. In International Symposium on Robot and Human Interactive Communication (RO-MAN), page 405-410, Lisbon, Portugal, Aug 2017. ( details ) ( .pdf )
- Miller, B. & Feil-Seifer, D. Embodiment, Situatedness and Morphology for Humanoid Interaction, page 1-23. Springer Netherlands, Mar 2017. ( details ) ( .pdf )
- Poston, J., Lucas, H., Carlson, Z., & Feil-Seifer, D. Does the Safety Demand Characteristic Influence Human-Robot Interaction?. In International Conference on Social Robotics (ICSR), volume 9979, page 850-859, Springer International Publication. Nov 2016. Springer International Publication. ( details ) ( .pdf )
- Al Zayer, M., Tregillus, S., Bhandari, J., Feil-Seifer, D., & Folmer, E. Exploring the Use of a Drone to Guide Blind Runners. Poster Paper in International ACM SIGACCESS Conference on Computers and Accessibility, page 263-264, Reno, NV, Oct 2016. ( details ) ( .pdf )
Supported Projects
Safety Demand Characteristic June 1, 2016 - Nov. 1, 2017
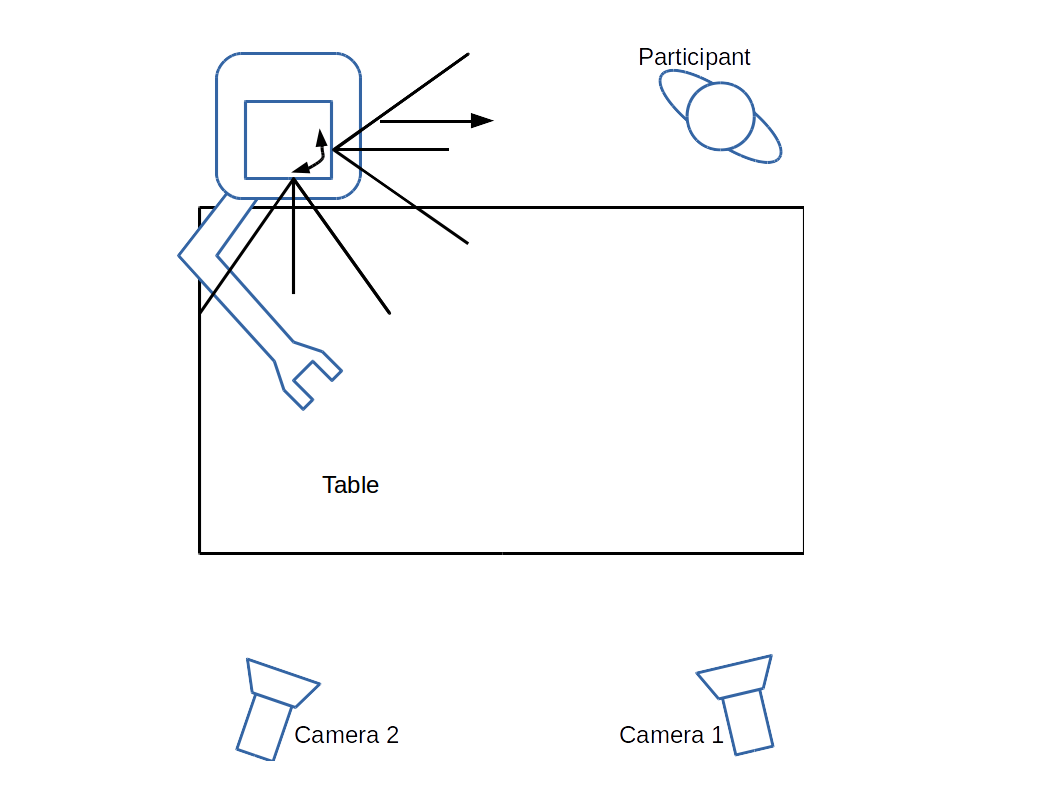 While it is increasingly common to have robots in real-world environments, many Human-Robot Interaction studies are conducted in laboratory settings. Evidence shows that laboratory settings have the potential to skew participants' feelings of safety. This project probes the consequences of this Safety Demand Characteristic and its impact on the field of Human-Robot Interaction.
While it is increasingly common to have robots in real-world environments, many Human-Robot Interaction studies are conducted in laboratory settings. Evidence shows that laboratory settings have the potential to skew participants' feelings of safety. This project probes the consequences of this Safety Demand Characteristic and its impact on the field of Human-Robot Interaction.
Disaster Management Simulator Jan. 1, 2016 - Jan. 1, 2018
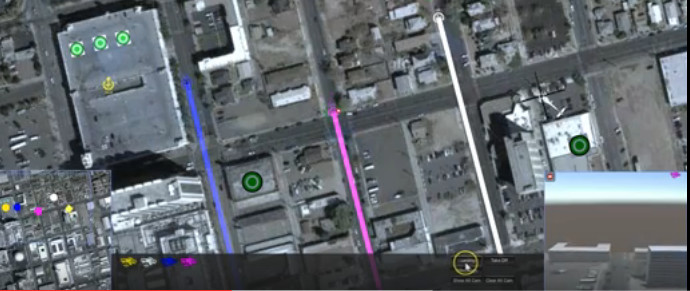 We are developing a disaster mitigation training simulator for emergency management personnel to develop skills tasking multi-UAV swarms for overwatch or delivery tasks. This simulator shows the City of Reno after a simulated earthquake and allows an operator to fly a simulated UAV swarm through this disaster zone to accomplish tasks to help mitigate the effects of the scenario. We are using this simulator to evaluate user interface design and to help train emergency management personnel in effective UAV operation.
We are developing a disaster mitigation training simulator for emergency management personnel to develop skills tasking multi-UAV swarms for overwatch or delivery tasks. This simulator shows the City of Reno after a simulated earthquake and allows an operator to fly a simulated UAV swarm through this disaster zone to accomplish tasks to help mitigate the effects of the scenario. We are using this simulator to evaluate user interface design and to help train emergency management personnel in effective UAV operation.
FRIDI: First Responder Interface for Disaster Information Aug. 1, 2014 - Dec. 31, 2018
In recent years robots have been deployed in numerous occasions to support disaster mitigation missions through exploration of areas that are either unreachable or potentially dangerous for human rescuers. The UNR Robotics Research Lab has recently teamed up with a number of academic, industry, and public entities with the goal of developing an operator interface for controlling unmanned autonomous system, including the UAV platforms to enhance the situational awareness, response time, and other operational capabilities of first responders during a disaster remediation mission. The First Responder Interface for Disaster Information (FRIDI) will include a computer-based interface for the ground control station (GCS) as well as the companion interface for portable devices such as tablets and cellular phones. Our user interface (UI) is designed with the goal of addressing the human-robot interaction challenges specific to law enforcement and emergency response operations, such as situational awareness and cognitive overload of the human operators. Situational Awareness, or otherwise the understanding that the human operator has about the location, activities, surroundings, and the status of the unmanned aerial vehicle (UAV), is a key factor that determines the success in a robot-assisted disaster mitigation operation. With that in mind, our goal is to design an interface that will use pre-loaded terrain data augmented with real-time data from the UAV sensors to provide for a better SA during the disaster mitigation mission. Our UI displays a map of near-live images of the scene as recorded from UAVs, position and orientation of the vehicles in the map, as well as video and other sensor readings that are crucial for the efficiency of the emergency response operation. This UI layout enables human operators to view and task multiple individual robots while also maintaining full situational awareness over the disaster area as a whole.